

© Patrick Pollmeier
Wissen für den Roboteralltag
Von Bügeln bis Kochen – um im Alltag zu funktionieren, brauchen Roboter viel Wissen. Das Projekt KnowRob will es ihnen erschließen
Wie komplex unsere Alltagsumgebung ist, erkennen wir vielleicht erst, wenn wir versuchen, sie mit dem Blick eines Roboters zu sehen. Was ist ein Tisch? Wo in der Küche finde ich die Milchflasche? Wie kann ich sie hochheben? Unzählige Informationen, über die wir in der Regel nicht nachdenken. Doch jede einzelne von ihnen ist essenziell für einen Roboter, der uns perspektivisch im Alltag helfen soll. Forschende des Institute for Artificial Intelligence (IAI) arbeiten daher an „KnowRob“, einer Wissenssoftware für Roboter.
Wer hätte ihn nicht gerne, den Roboter, der Essen kocht, danach noch die Spülmaschine einräumt und die Wäsche bügelt? Das Potenzial dazu hätten einige Roboter am IAI der Universität Bremen. In einem eigens für sie eingerichteten Apartmentlabor mit einer Küche und einem Wohnbereich sollen sie lernen, Haushaltsaufgaben zu erledigen. Die technische Ausstattung hierfür – Sensoren, Kameras und mechanische Arme – bringen sie bereits mit. Was sie jedoch am dringendsten für den Einsatz im Alltag brauchen, ist Wissen über menschliche Umgebungen wie beispielsweise eine Küche. Denn bei ihrer Fabrikation erhalten Roboter meist nur einige Grundinformationen, etwa über ihre eigene Ausstattung. Damit sie sich noch mehr Informationen aneignen können, arbeitet ein Team von Forschenden der Universität Bremen seit 2013 an der Software KnowRob.
Federführend ist dabei seit Beginn Michael Beetz, Professor für Künstliche Intelligenz am Fachbereich für Mathematik und Informatik und Leiter des IAI. Die Bremer Forschenden wollen mit KnowRob Roboter befähigen, menschliche Anweisungen zu verstehen. Konfrontiert mit einer Aufforderung wie „Bügel die Wäsche“ könnte der Roboter also in Erfahrung bringen, was Wäsche überhaupt ist, wo man sie normalerweise findet und was „Bügeln“ bedeutet. Aber wie funktioniert die Software?
Vom Wissen zum Handeln – wie KnowRob funktioniert
Grundlage von KnowRob sind Datenbanken mit Informationen, vor allem „SOMA“ (Socio-physical Model of Activities), das an der Universität Bremen entwickelt worden ist. Diese Wissensdatenbank liefert roboter-spezifisches Wissen über den Roboter selbst und seine Aufgaben sowie über Objekte und Umgebungen im Bremer Robotiklabor, etwa in welchem Schrank sich ein Bügelbrett befindet und was man damit machen kann. Daneben greift KnowRob auch auf Wikidata zurück. Ähnlich wie Wikipedia enthält Wikidata frei verfügbares Wissen zu den unterschiedlichsten Themen und ist dabei auch für Maschinen lesbar. „Das hilft uns ungemein, denn wir können auf Beschreibungen von Gegenständen zurückgreifen und müssen so nicht alles neu definieren“, sagt Dr. Daniel Beßler, IAI-Forscher und einer der Hauptentwickler von KnowRob.
Doch wie können die Roboter auf die Informationen von Wikidata und SOMA zurückgreifen? An dieser Stelle kommt KnowRob ins Spiel, denn es schafft eine Verbindung zwischen den Datenbanken und der realen Umwelt der Roboter. „Durch KnowRob können die Roboter beispielsweise Bilder, die sie aufnehmen, mit den Informationen aus den Datenbanken abgleichen. So erkennen sie, von welchen Gegenständen sie umgeben sind und welche Eigenschaften und Funktionen diese Objekte haben“, sagt IAI-Forscher und KnowRob-Entwickler Sascha Jongebloed. Darüber hinaus ermöglicht KnowRob den Robotern Schlussfolgerungen: Aus den beiden Informationen, dass Milch verderblich ist und dass ein Kühlschrank verderbliche Lebensmittel enthält, können die Roboter mittels KnowRob schließen, dass Milch sich meistens im Kühlschrank befindet.
All das – Wissen und Schlussfolgerungen – befähigt den Roboter aber noch nicht zum Handeln. „Hierfür haben wir mit CRAM noch ein weiteres Programm entwickelt“, erläutert Sascha Jongebloed. Aus dem Wissen von KnowRob leitet CRAM (kurz für „Cognitive Robot Abstract Machine“) Handlungen her. Die Aufforderung „Bügel die Wäsche“ etwa unterteilt es in kleinere Befehle wie „Gehe zur Wäsche“, „Hebe die Wäsche auf“, „Bringe sie zum Bügelbrett“ und „Bewege das Bügeleisen über die Wäsche.“
openEASE: freies Roboterwissen für alle
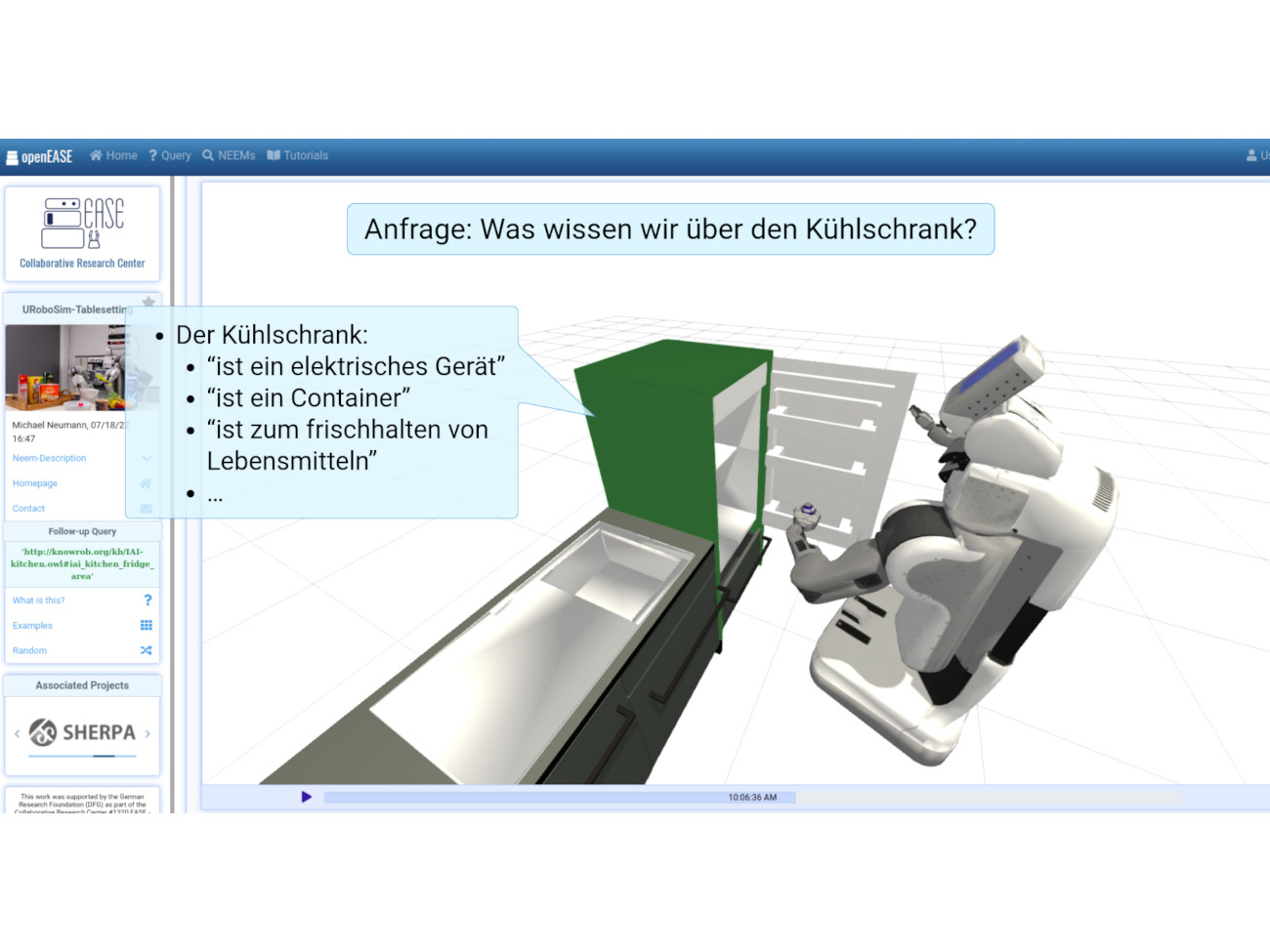
Dass das Zusammenspiel all dieser unterschiedlichen Softwarekomponenten funktioniert, lässt sich im Bremer Robotiklabor bereits beobachten. Zum Beispiel, wenn Roboter Pfannkuchen backen oder Popcorn machen. Solche Experimente führen hier nicht nur Bremer Wissenschaftler:innen durch - auch Forschende aus aller Welt können in einem digitalen Labor mit digitalen Zwillingen der Bremer Roboter arbeiten. „Die internationale Vernetzung ist uns ein wichtiges Anliegen“, betont auch Daniel Beßler. So ist die Universität Bremen Mitglied im europäischen Robotik-Exzellenznetzwerk eurROBIN, dem 30 Forschungsinstitutionen und weitere Akteure aus 14 Ländern angehören. Ein wichtiger Beitrag der Bremer Forschenden ist dabei openEASE: eine offene Wissensplattform, die im Sonderforschungsbereich EASE „Everyday Activity in Science and Engineering“ aufgebaut worden ist. Hier laden die Forschenden Aufzeichnungen von Roboterexperimenten hoch, die dann als Open-Source-Materialien weltweit verfügbar sind. Wer sich die Aufzeichnungen ansieht, kann nachvollziehen, welche Informationen der Roboter zu welchem Zeitpunkt von KnowRob bekommen hat. Zu sehen ist dann beispielsweise eine digitale Reproduktion des Bremer Robotiklabors. „Wenn man auf die einzelnen Gegenstände klickt, kann man genau sehen, welches Wissen die Roboter von ihnen haben und wo vielleicht noch Wissenslücken sind“, sagt Sascha Jongebloed.
© Sascha Jongebloed / Universität Bremen
Erklärbare KI im Fokus
Mit diesem Ansatz verfolgen die Forschenden das Ziel der erklärbaren KI: Roboter sollen Handlungen nicht nur korrekt ausführen, sondern es soll auch nachvollziehbar sein, warum sie auf eine bestimmte Art gehandelt haben – nicht nur für die Menschen, die mit ihnen arbeiten, sondern auch für die Roboter selbst. Vor diesem Hintergrund arbeiten die Bremer Forschenden gerade an einer neuen Version von KnowRob. Hier sollen weitere Funktionen zur Verfügung stehen, die Forschende und Entwickler:innen dem Programm hinzufügen können. Dazu gehört beispielsweise, dass Roboter in Simulationen Situationen durchspielen, bevor sie handeln. Aktuell entwickeln die Roboter nämlich für jede Aufgabe, die Menschen ihnen stellen, erst einmal nur einen Lösungsweg. Menschen handeln anders, sagt Sascha Jongebloed. „Selbst bei einfachen Aufgaben, zum Beispiel, wenn wir den Tisch decken, überlegen wir intuitiv, welche unterschiedlichen Herangehensweisen es gibt und welche sich aktuell am besten eignet.“ Mit der Fähigkeit zu simulieren werden Roboter den Menschen also noch etwas ähnlicher – und ein weiterer Schritt auf dem Weg zum langersehnten Roboter für Haushaltsaufgaben ist getan.