
© Viktoria Stoiser
OP-Training in der Virtuellen Realität
Mit Hilfe eines Simulators können Mediziner den Einsatz von Hüftimplantaten trainieren
Der Einsatz eines Hüftimplantats stellt Chirurginnen und Chirurgen vor besondere Herausforderungen: Wie stark muss der Druck sein, wenn die Hüftgelenkpfanne per Hand ausgefräst wird? Wie trennt man den Hüftgelenkkopf ab? Das Gefühl für diese kritischen Operationsschritte müssen angehende Ärztinnen und Ärzte erst entwickeln. Dabei unterstützt sie zukünftig ein dynamischer Hüftimplantatsimulator, der gemeinsam von der Universität Bremen und der Technischen Universität (TU) Chemnitz entwickelt wird.
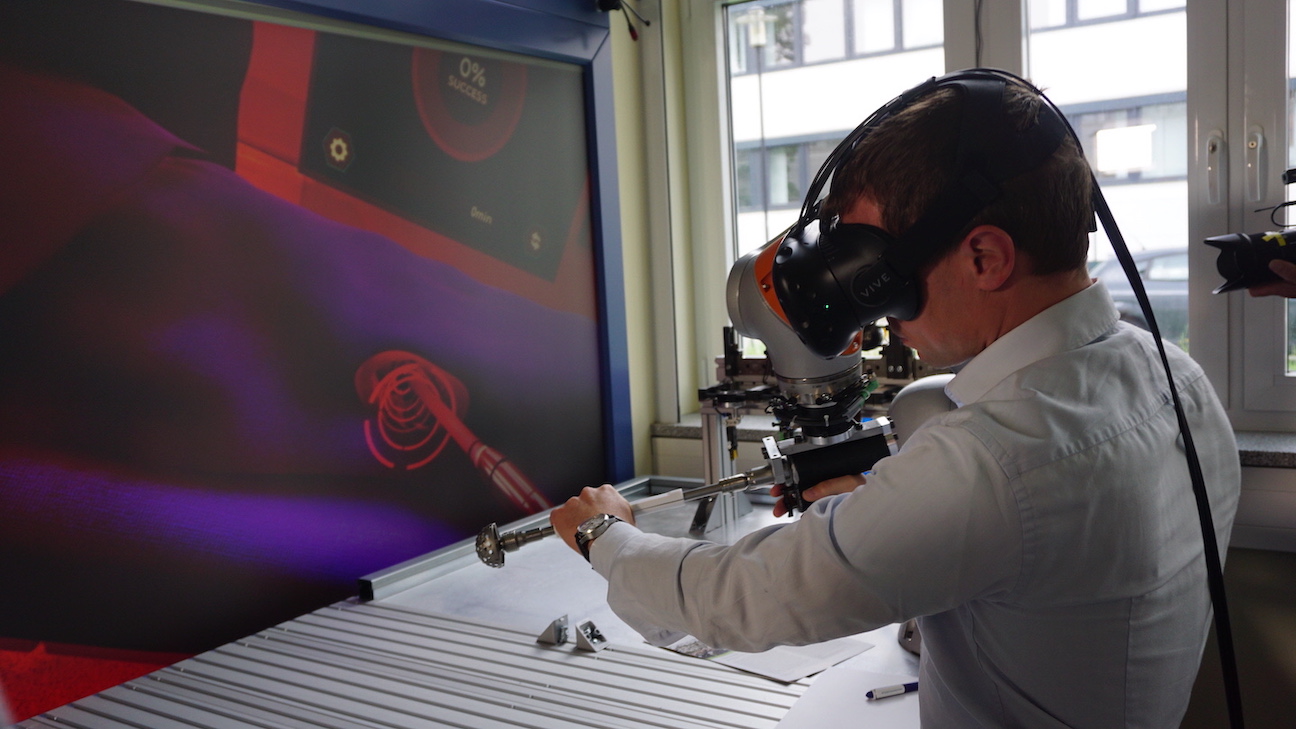
Mit dem Gerät, das im Projekt „Dynamic HIPS“ entwickelt wird, sollen die Operationsschritte praxisnah simuliert werden. Im Mittelpunkt stehen drei besonders kritische Phasen: das Abtrennen des Hüftgelenkkopfs, das Ausschaben des Oberschenkelknochens und die Implantation des Kunstgelenks. Die Simulation anhand eines Roboterarms erfolgt in der virtuellen Realität, gibt jedoch gleichzeitig ein haptisches Feedback.
Einen Eindruck vermittelt das Video-Kurzporträt des Vorläufers:
© CAT Production GmbH München
„Die angehenden Chirurginnen und Chirurgen erhalten durch das System die Möglichkeit, bereits vor ihrer ersten realen OP ein großes Erfahrungswissen zu sammeln.”
Professor Gabriel Zachmann vom Technologie-Zentrum Informatik und Informationstechnik (TZI) der Universität Bremen erklärt: „Die angehenden Chirurginnen und Chirurgen erhalten durch das System die Möglichkeit, bereits vor ihrer ersten realen OP ein großes Erfahrungswissen zu sammeln. Auch erfahrene Chirurginnen und Chirurgen profitieren von diesem Trainingssimulator, zum Beispiel durch das Trainieren von komplizierten, selten durchgeführten Eingriffen.“
Bedingungen während der OP-Schritte simulieren
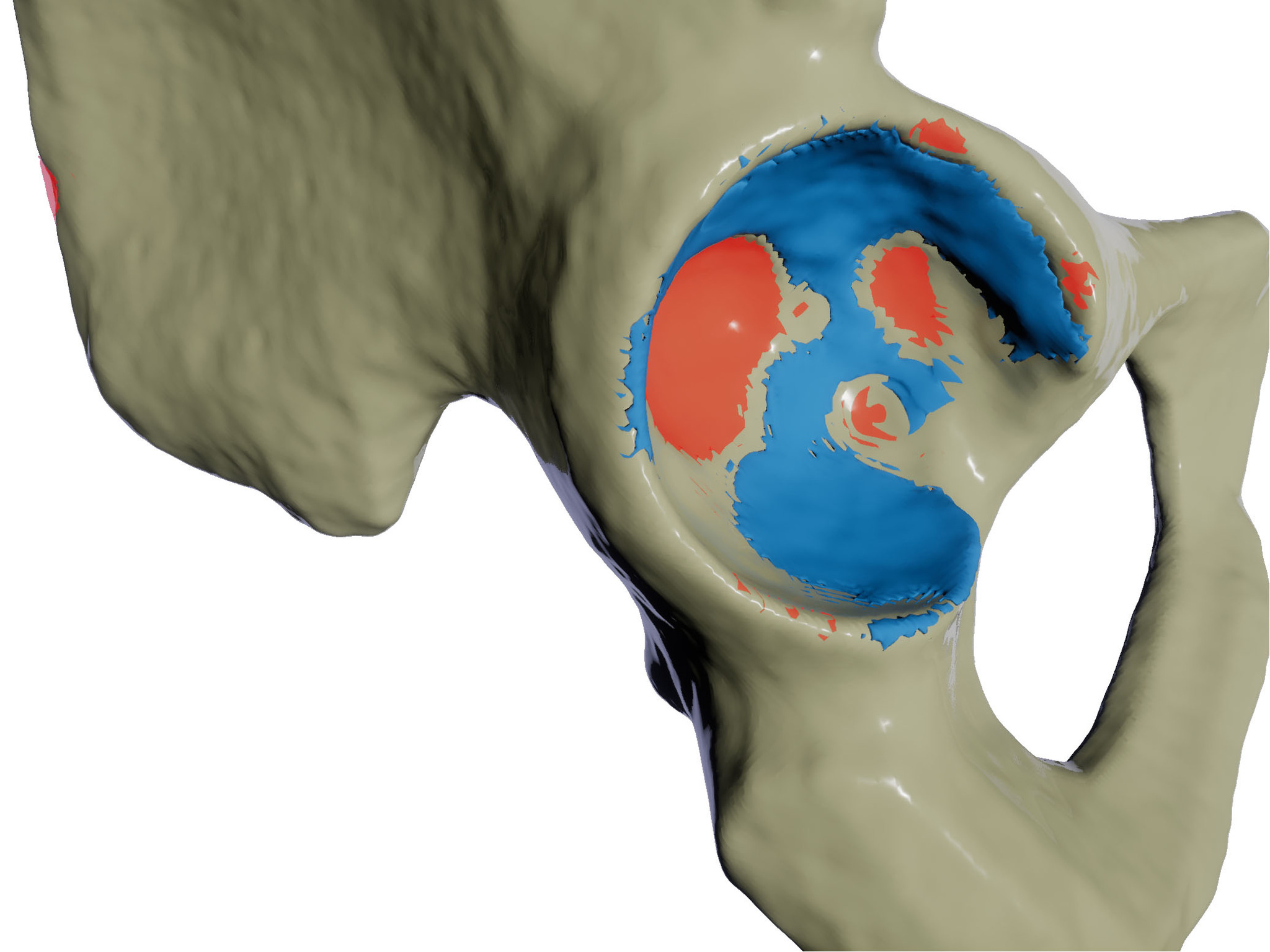
Ziel des Projekts „Dynamic HIPS“ ist es, die Bedingungen wie Kraft, Drehmoment und Geschwindigkeit, die während der Operationsschritte herrschen, zu bestimmen. Zudem soll ein mathematisches Modell entwickelt werden, das die Widerstände und den Materialabtrag am Knochen simuliert. Diese Informationen werden dann im Simulator in ein möglichst realistisches Szenario übersetzt.
„Bis jetzt fehlt es an Trainingsgeräten, die den Chirurginnen und Chirurgen genau die gleichen Sinneswahrnehmungen vermitteln können, die sie auch bei einer realen Operation spüren würden, zum Beispiel den Widerstand des Knochens beim Sägen und Ausschaben,“ erklärt Mario Lorenz, Professur für Werkzeugmaschinenkonstruktion und Umformtechnik an der TU Chemnitz.
© Maximilian Kaluschke
„Remote-Training“ von überall auf der Welt möglich
Mit Hilfe eines Multi-User-Systems können Medizinerinnen und Mediziner unabhängig von ihrem Standort an der Simulation teilnehmen. Diese Funktionalität erleichtert nicht nur den Transfer von medizinischer Expertise in Schwellen- und Entwicklungsländer, sondern dient auch dem Erkenntnisaustausch zwischen erfahrenen Chirurginnen und Chirurgen. Um den Simulator so nutzerzentriert wie möglich zu gestalten, werden Operateure und Operateurinnen bereits in der Entwicklung hinzugezogen. In der letzten Projektphase wird außerdem eine Nutzerstudie durchgeführt.